HarmonyOSAPP控制超声波小车
1、超声波小车介绍
①.本项目采用的开发套件为HiSpark Wi-Fi IoT智能小车。
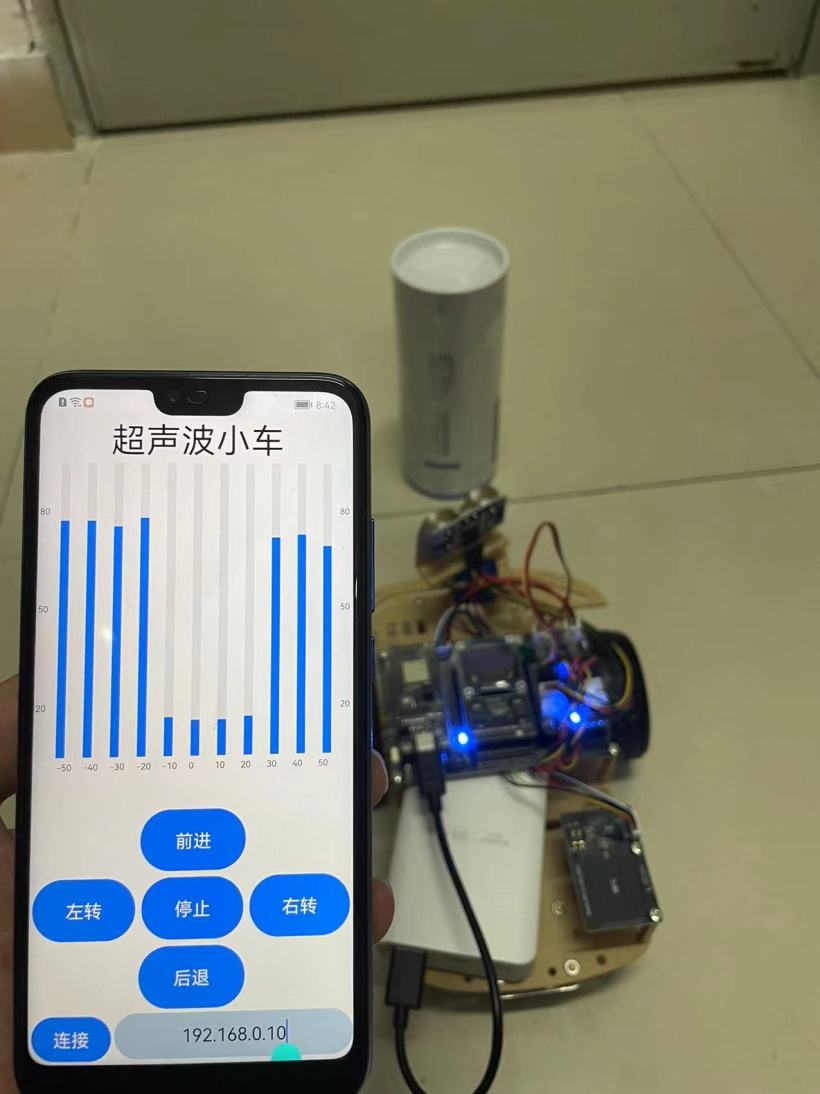
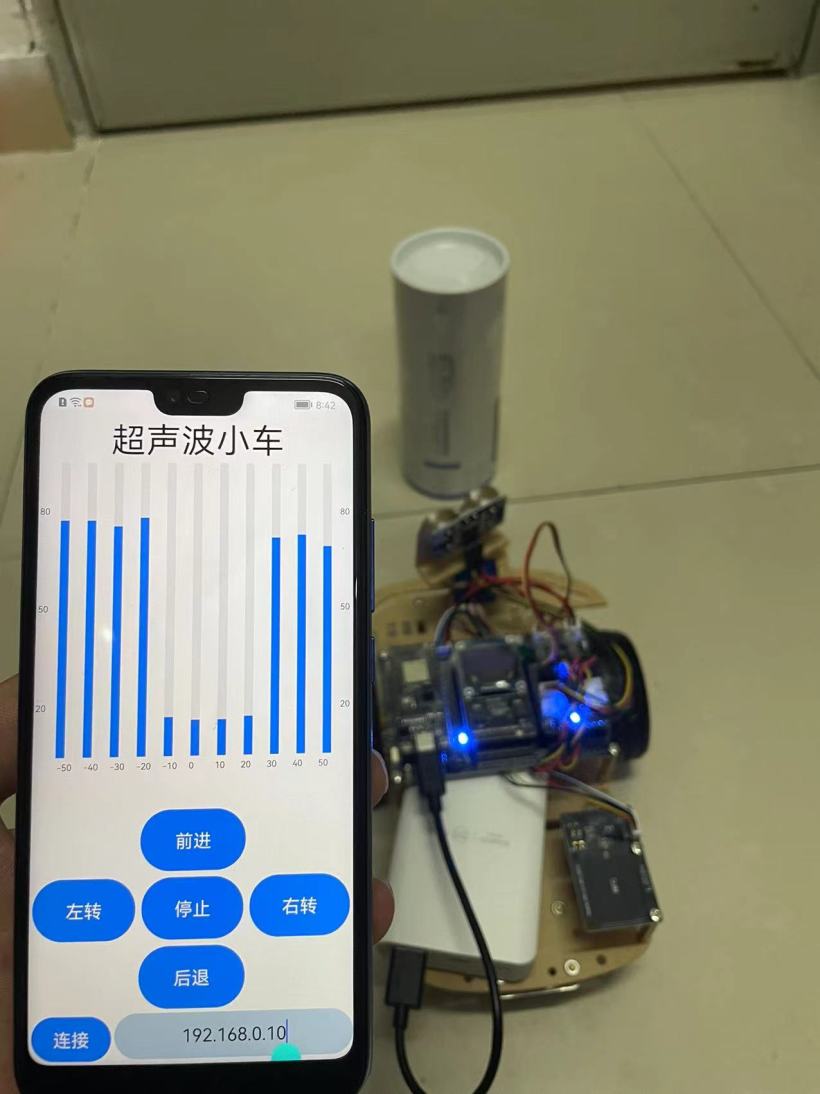
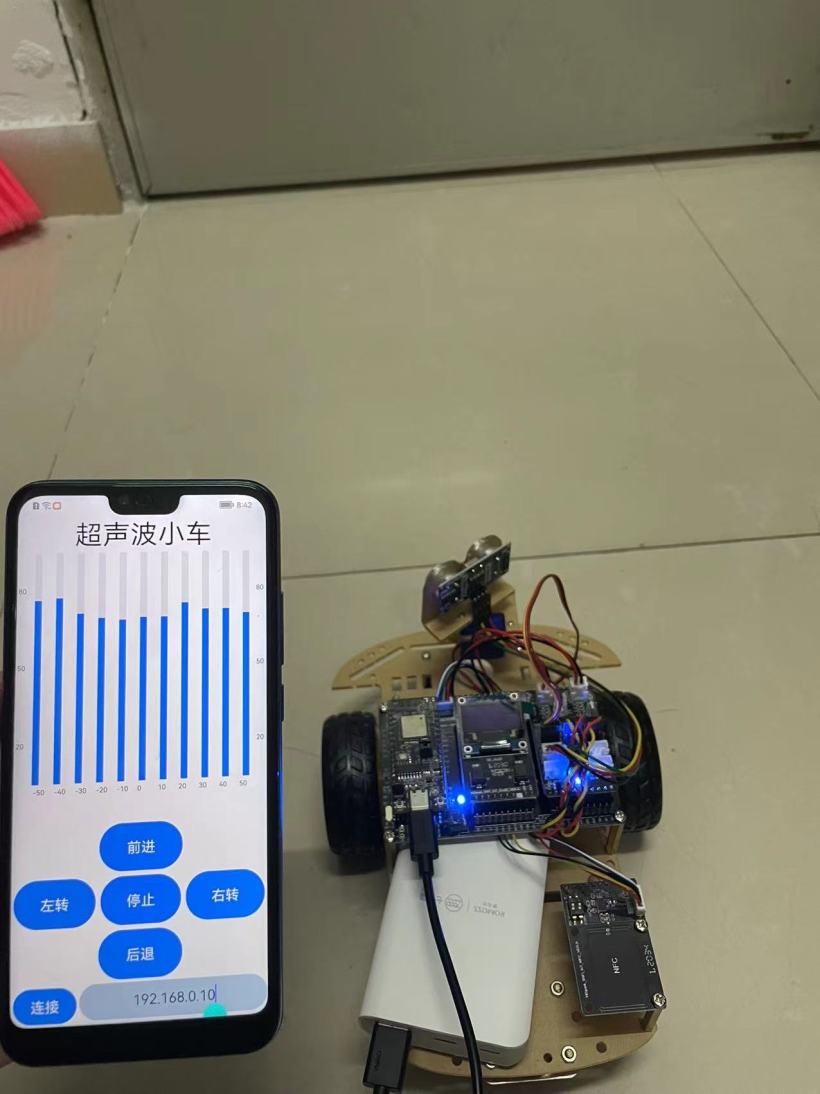
②.项目预览。
视频链接:https://www.bilibili.com/video/BV1pS4y1Y72j/。
代码开源地址:https://gitee.com/yukoyu/harmony-wifi-car。
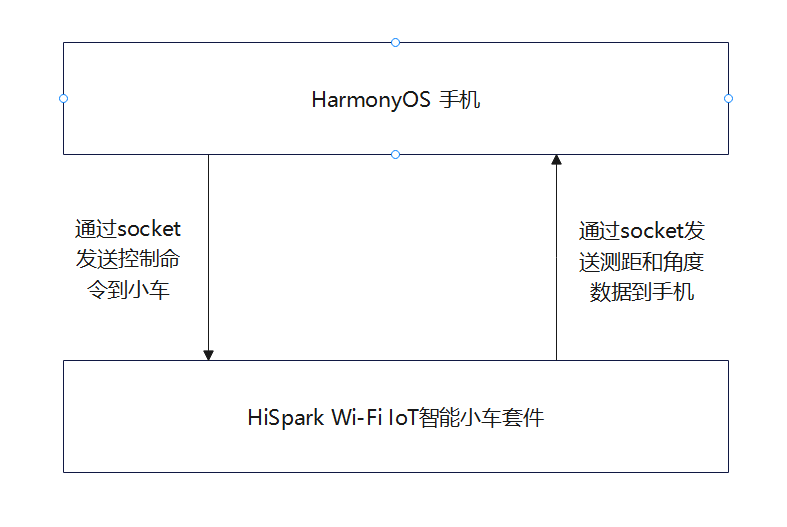
③.框架图
④.HarmonyOS采用 JAVA方式开发
2、小车端开发
①.新建文件夹。
路径:openharmony\applications\sample\wifi-iot\app\
mkdir wificar
②.编写小车电机驱动。
路径:openharmony\applications\sample\wifi-iot\app\wificar\robot_l9110s.c
代码:
#define GPIO0 0
#define GPIO1 1
#define GPIO9 9
#define GPIO10 10
#define GPIOFUNC 0
#define PWM_FREQ_FREQUENCY (60000)
void gpio_control (unsigned int gpio, IotGpioValue value) {
hi_io_set_func(gpio, GPIOFUNC);
IoTGpioSetDir(gpio, IOT_GPIO_DIR_OUT);
IoTGpioSetOutputVal(gpio, value);
}
//后退
void car_backward(void) {
gpio_control(GPIO0, IOT_GPIO_VALUE0);
gpio_control(GPIO1, IOT_GPIO_VALUE1);
gpio_control(GPIO9, IOT_GPIO_VALUE0);
gpio_control(GPIO10, IOT_GPIO_VALUE1);
}
//前进
void car_forward(void) {
gpio_control(GPIO0, IOT_GPIO_VALUE1);
gpio_control(GPIO1, IOT_GPIO_VALUE0);
gpio_control(GPIO9, IOT_GPIO_VALUE1);
gpio_control(GPIO10, IOT_GPIO_VALUE0);
}
//左转
void car_left(void) {
gpio_control(GPIO0, IOT_GPIO_VALUE0);
gpio_control(GPIO1, IOT_GPIO_VALUE0);
gpio_control(GPIO9, IOT_GPIO_VALUE1);
gpio_control(GPIO10, IOT_GPIO_VALUE0);
}
//右转
void car_right(void) {
gpio_control(GPIO0, IOT_GPIO_VALUE1);
gpio_control(GPIO1, IOT_GPIO_VALUE0);
gpio_control(GPIO9, IOT_GPIO_VALUE0);
gpio_control(GPIO10, IOT_GPIO_VALUE0);
}
//停止转动
void car_stop(void) {
gpio_control(GPIO0, IOT_GPIO_VALUE1);
gpio_control(GPIO1, IOT_GPIO_VALUE1);
gpio_control(GPIO9, IOT_GPIO_VALUE1);
gpio_control(GPIO10, IOT_GPIO_VALUE1);
}
③.编写舵机驱动。
路径:openharmony\applications\sample\wifi-iot\app\wificar\robot_sg90.c
代码:
#define GPIO2 2
void set_angle( unsigned int duty) {
IoTGpioInit(GPIO2);
IoTGpioSetDir(GPIO2, IOT_GPIO_DIR_OUT);
IoTGpioSetOutputVal(GPIO2, IOT_GPIO_VALUE1);
hi_udelay(duty);
IoTGpioSetOutputVal(GPIO2, IOT_GPIO_VALUE0);
hi_udelay(20000 - duty);
}
//控制电机转动角度 参数范围 1000<time<2000
void custom(int time)
{
for (int i = 0; i <10; i++) {
set_angle(time);
}
}
④.编写超声波驱动。
路径:openharmony\applications\sample\wifi-iot\app\wificar\robot_hcsr04.c
代码:
#define GPIO_8 8
#define GPIO_7 7
#define GPIO_FUNC 0
extern int cmm;
void GetDistance (float *distance) {
static unsigned long start_time = 0, time = 0;
IotGpioValue value = IOT_GPIO_VALUE0;
unsigned int flag = 0;
IoTWatchDogDisable();
hi_io_set_func(GPIO_8, GPIO_FUNC);
IoTGpioSetDir(GPIO_8, IOT_GPIO_DIR_IN);
IoTGpioSetDir(GPIO_7, IOT_GPIO_DIR_OUT);
IoTGpioSetOutputVal(GPIO_7, IOT_GPIO_VALUE1);
hi_udelay(20);
IoTGpioSetOutputVal(GPIO_7, IOT_GPIO_VALUE0);
while (1) {
IoTGpioGetInputVal(GPIO_8, &value);
if ( value == IOT_GPIO_VALUE1 && flag == 0)
start_time = hi_get_us();
flag = 1;
}
if (value == IOT_GPIO_VALUE0 && flag == 1) {
time = hi_get_us() - start_time;
start_time = 0;
break;
}
}
*distance = time * 0.034 / 2;
printf("distance is %f\r\n",*distance);
return ;
}
⑤.编写wifi和socket server。
路径:openharmony\applications\sample\wifi-iot\app\wificar\wifi_sockets.c
代码:
// 接收、发送的数据
static char request[256] = "";
// 未连接热点=0,已连接热点=1
static int g_connected = 0;
int connfd = -1;
// 输出连接信息字符串
// 打印内容样例--> bssid: 38:47:BC:49:01:FA, rssi: 0, connState: 0, reason: 0, ssid: MyMobile
void PrintLinkedInfo(WifiLinkedInfo* info) {
if (!info) return;
static char macAddress[32] = {0};
unsigned char* mac = info->bssid;
snprintf(macAddress, sizeof(macAddress), "%02X:%02X:%02X:%02X:%02X:%02X", mac[0], mac[1], mac[2], mac[3], mac[4], mac[5]);
printf("bssid: %s, rssi: %d, connState: %d, reason: %d, ssid: %srn", macAddress, info->rssi, info->connState, info->disconnectedReason, info->ssid);
}
// 连接状态改变事件处理
void OnWifiConnectionChanged(int state, WifiLinkedInfo* info) {
if (!info) return;
// 输出类似内容:OnWifiConnectionChanged 31, state = 1, info =
printf("%s %d, state = %d, info = rn", __FUNCTION__, __LINE__, state);
PrintLinkedInfo(info);
// 根据连接状态设置g_connected
if (state == WIFI_STATE_AVALIABLE) {
g_connected = 1;
} else {
g_connected = 0;
}
}
// 扫描状态改变事件处理
void OnWifiScanStateChanged(int state, int size) {
printf("%s %d, state = %X, size = %drn", __FUNCTION__, __LINE__, state, size);
}
void DisconnectTcpSocket(int connfd) {
sleep(1);
printf("do_disconnect...rn");
lwip_close(connfd);
sleep(1); // for debug
}
void CloseTcpSocket(int socketfd) {
printf("do_cleanup...rn");
lwip_close(socketfd);
}
static void TcpServerHandler(void) {
ssize_t retval = 0;
unsigned short port = 20222;
// 创建一个通信的Socket,并返回一个Socket文件描述符。第一个参数IpV4,第二个参数SOCK_STREAM类型,第三个指用到的协议
int sockfd = socket(AF_INET, SOCK_STREAM, 0);
// 客户端地址和地址长度
struct sockaddr_in clientAddr = {0};
socklen_t clientAddrLen = sizeof(clientAddr);
// 服务端地址
struct sockaddr_in serverAddr = {0};
serverAddr.sin_family = AF_INET;
// htons是将整型变量从主机字节顺序转变成网络字节顺序,就是整数在地址空间存储方式变为高位字节存放在内存的低地址处
serverAddr.sin_port = htons(port);
// 监听本机的所有IP地址,INADDR_ANY=0x0
// 将主机数转换成无符号长整型的网络字节顺序
serverAddr.sin_addr.s_addr = htonl(INADDR_ANY);
// 服务端绑定端口
retval = bind(sockfd, (struct sockaddr *)&serverAddr, sizeof(serverAddr));
if (retval < 0) {
printf("bind failed, %ld!rn", retval);
CloseTcpSocket(sockfd);
return;
}
printf("bind to port %d success!rn", port);
// 开始监听,backlog指Pending连接队列增长到的最大长度。队列满了,再有新连接请求到达,则客户端ECONNREFUSED错误。如果支持重传,则请求忽略。
int backlog = 1;
retval = listen(sockfd, backlog);
if (retval < 0) {
printf("listen failed!rn");
CloseTcpSocket(sockfd);
return;
}
printf("listen with %d backlog success!rn", backlog);
int outerFlag = 1;
while (outerFlag) {
// 接受客户端连接,成功会返回一个表示连接的 socket。clientAddr参数将会携带客户端主机和端口信息;失败返回 -1
// 从Pending连接队列中获取第一个连接,根据sockfd的socket协议、地址族等内容创建一个新的socket文件描述,并返回。
// 此后的 收、发 都在 表示连接的 socket 上进行;之后 sockfd 依然可以继续接受其他客户端的连接,
// UNIX系统上经典的并发模型是“每个连接一个进程”——创建子进程处理连接,父进程继续接受其他客户端的连接
// 鸿蒙liteos-a内核之上,可以使用UNIX的“每个连接一个进程”的并发模型liteos-m内核之上,可以使用“每个连接一个线程”的并发模型
connfd = accept(sockfd, (struct sockaddr *)&clientAddr, &clientAddrLen);
if (connfd < 0) {
printf("accept failed, %d, %drn", connfd, errno);
CloseTcpSocket(sockfd);
//outerFlag = 0;
}
printf("accept success, connfd = %d !rn", connfd);
// inet_ntoa:网络地址转换成“.”点隔的字符串格式。ntohs:16位数由网络字节顺序转换为主机字节顺序。
printf("client addr info: host = %s, port = %drn", inet_ntoa(clientAddr.sin_addr), ntohs(clientAddr.sin_port));
int innerFlag = 1;
// 接收消息,然后发送回去
while (innerFlag) {
// 后续 收、发 都在 表示连接的 socket 上进行;
// 在新的Socket文件描述上接收信息.
retval = recv(connfd, request, sizeof(request), 0);
if (retval < 0) {
printf("recv request failed, %ld!rn", retval);
innerFlag = 0;
} else if (retval == 0) {
// 对方主动断开连接
printf("client disconnected!rn");
innerFlag = 0;
} else {
//printf("recv request{%s} from client done!rn", request);
// 发送数据
printf("cc = %d %d %d \r\n",request[0],request[1],request[2]);
if (retval <= 0) {
printf("send response failed, %ld!rn", retval);
innerFlag = 0;
}
if(retval == 3 && request[0] == -86)
{
if(request[1] = 0x00){
retval = send(connfd, "aaok", strlen("aaok"), 0);
}
if(request[1] = 0x01)
{
switch (request[2])
{
case 1: car_forward();break;
case 2: car_right();break;
case 3: car_backward();break;
case 4: car_left();break;
case 0: car_stop();break;
}
}
}
//printf("send response{%s} to client done!rn", request);
// 清空缓冲区
memset(&request, 0, sizeof(request));
}
if(innerFlag == 0)
{
DisconnectTcpSocket(connfd);
//outerFlag = 0;
}
}
CloseTcpSocket(sockfd);
}
}
void *TcpServerTask(void *arg) {
(void)arg;
// 先定义两个Wifi监听器,一个连接改变、一个状态改变
WifiEvent eventListener = {
.OnWifiConnectionChanged = OnWifiConnectionChanged,
.OnWifiScanStateChanged = OnWifiScanStateChanged
};
// 等待10个系统Ticks。每个ticks多少个us,计算方式= 1000 * 1000 / osKernelGetTickFreq()
osDelay(10);
// 注册监听器
WifiErrorCode errCode = RegisterWifiEvent(&eventListener);
printf("RegisterWifiEvent: %drn", errCode);
// 设置Wifi热点信息
WifiDeviceConfig apConfig = {};
strcpy(apConfig.ssid, "PDCN");
strcpy(apConfig.preSharedKey, "1234567888");
apConfig.securityType = WIFI_SEC_TYPE_PSK;
int netId = -1;
// 启用Wifi
errCode = EnableWifi();
printf("EnableWifi: %drn", errCode);
osDelay(10);
// 设置Wifi热点配置信息,返回生成的网络Id-netId。
errCode = AddDeviceConfig(&apConfig, &netId);
printf("AddDeviceConfig: %drn", errCode);
// 根据网络Id连接到Wifi热点
g_connected = 0;
errCode = ConnectTo(netId);
printf("ConnectTo(%d): %drn", netId, errCode);
// 未连接完成,则一直等待。g_connected状态会在事件中设置。
while (!g_connected) {
osDelay(10);
}
printf("g_connected: %drn", g_connected);
osDelay(50);
// 联网业务开始,找到netifname=wlan0的netif。
struct netif* iface = netifapi_netif_find("wlan0");
if (iface) {
// 启动DHCP客户端,获取IP地址
err_t ret = netifapi_dhcp_start(iface);
printf("netifapi_dhcp_start: %drn", ret);
// 等待DHCP服务器反馈给予地址
osDelay(300);
// 执行线程安全的网络方法,第二个参数是voidFunc,第三个参数是errFunc。如果没有errFunc,那么就执行voidFunc。
// netifapi_dhcp_start/netifapi_dhcp_stop等都是调用的netifapi_netif_common方法。
// dhcp_clients_info_show显示信息
/*
server :
server_id : 192.168.0.1
mask : 255.255.255.0, 1
gw : 192.168.0.1
T0 : 3600
T1 : 1800
T2 : 3150
clients <1> :
mac_idx mac addr state lease tries rto
0 b4c9b9af69f8 192.168.0.10 10 0 1 2
*/
ret = netifapi_netif_common(iface, dhcp_clients_info_show, NULL);
printf("netifapi_netif_common: %drn", ret);
}
TcpServerHandler();
// 联网业务结束,断开DHCP
err_t ret = netifapi_dhcp_stop(iface);
printf("netifapi_dhcp_stop: %drn", ret);
// 断开Wifi热点连接
Disconnect();
// 移除Wifi热点的配置
RemoveDevice(netId);
// 关闭Wifi
errCode = DisableWifi();
printf("DisableWifi: %drn", errCode);
osDelay(200);
}
void WifiSockets(void)
{
osThreadAttr_t wifisocket;
wifisocket.name = "TcpServerTask";
wifisocket.attr_bits = 0U;
wifisocket.cb_mem = NULL;
wifisocket.cb_size = 0U;
wifisocket.stack_mem = NULL;
wifisocket.stack_size = 10240;
wifisocket.priority = 25;
if (osThreadNew(TcpServerTask, NULL, &wifisocket) == NULL) {
printf("[Ssd1306TestDemo] Falied to create TcpServerTask!\n");
}
}
APP_FEATURE_INIT(WifiSockets);
⑥.编写主控制代码。
路径:openharmony\applications\sample\wifi-iot\app\wificar\robot_control.c
代码:
static char data[128] = "";
extern int connfd;
void *RobotCarTestTask(void* param)
{
(void)param;
float cmm = 0.0;
printf("switch\r\n");
int i= 0;
int flag = 0;
while (1) {
custom((i%11)*100 + 1000);
GetDistance(&cmm);
sprintf(data,"{\"angle\": %d,\"cm\":%f}",i,cmm);
send(connfd, data, strlen(data), 0);//发送距离到APP
//printf("\r\n cos = %d cm =%f\r\n",i,cmm);
if(flag == 0)
{
i++;
if(i%10 == 0)
{
flag = 1;
}
}else{
i--;
if(i%11 == 0)
{
flag = 0;
}
}
osDelay(25); //延时 250ms
}
}
void RobotCarDemo(void)
{
osThreadAttr_t attr;
attr.name = "RobotCarTestTask";
attr.attr_bits = 0U;
attr.cb_mem = NULL;
attr.cb_size = 0U;
attr.stack_mem = NULL;
attr.stack_size = 10240;
attr.priority = 25;
if (osThreadNew(RobotCarTestTask, NULL, &attr) == NULL) {
printf("[Ssd1306TestDemo] Falied to create RobotCarTestTask!\n");
}
}
APP_FEATURE_INIT(RobotCarDemo);
⑦.编写编译描述文件。
路径:openharmony\applications\sample\wifi-iot\app\wificar\BUILD.gn
代码:
static_library("car_wifi") {
sources = [
"robot_l9110s.c",
"robot_sg90.c",
"robot_control.c",
"robot_hcsr04.c",
"wifi_sockets.c",
]
deps =[
]
include_dirs = [
"//utils/native/lite/include",
"//kernel/liteos_m/kal/cmsis",
"//base/iot_hardware/peripheral/interfaces/kits",
"//device/hisilicon/hispark_pegasus/hi3861_adapter/hals/communication/wifi_lite/wifiservice",
"//device/hisilicon/hispark_pegasus/hi3861_adapter/kal",
"//device/hisilicon/hispark_pegasus/sdk_liteos/third_party/lwip_sack/include",
"//foundation/communication/wifi_lite/interfaces/wifiservice"
]
}
⑧.加入编译。
路径:openharmony\applications\sample\wifi-iot\app\BUILD.gn
代码:
import("//build/lite/config/component/lite_component.gni")
lite_component("app") {
features = [
"wificar:car_wifi"
]
}
⑨.编译。
(1)设置编译路径。
hb set
.(英文字符)
(2)选择wifiiot_hispark_pegasus。
(3)执行编译。
hb build -f
(4)输出路径
openharmony\out\hispark_pegasus\wifiiot_hispark_pegasus
⑩.烧录。
参考烧录:https://ost.51cto.com/posts/11118。
4、HarmonyOS 端开发
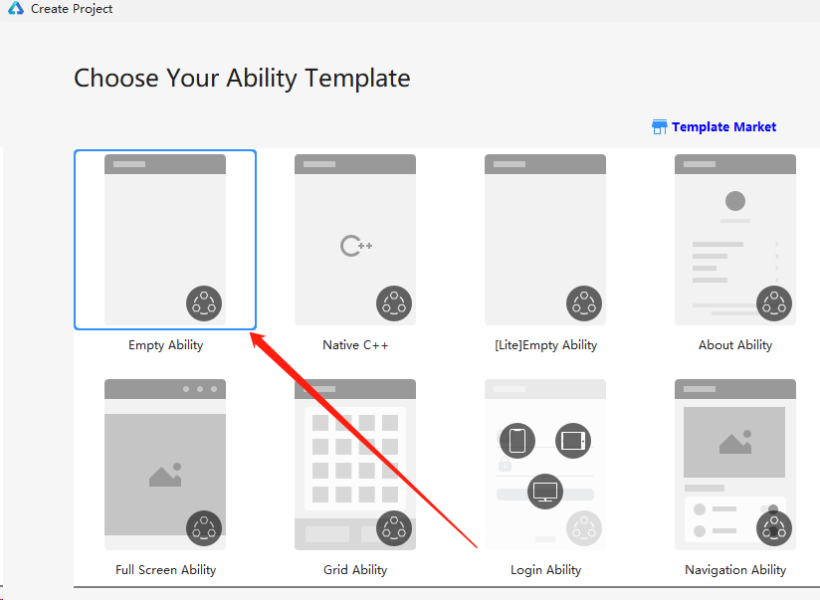
①.新建项目
打开 DevEco Studio 3.0.0.800。
选择File -> New ->New Project。
选择。
选择。
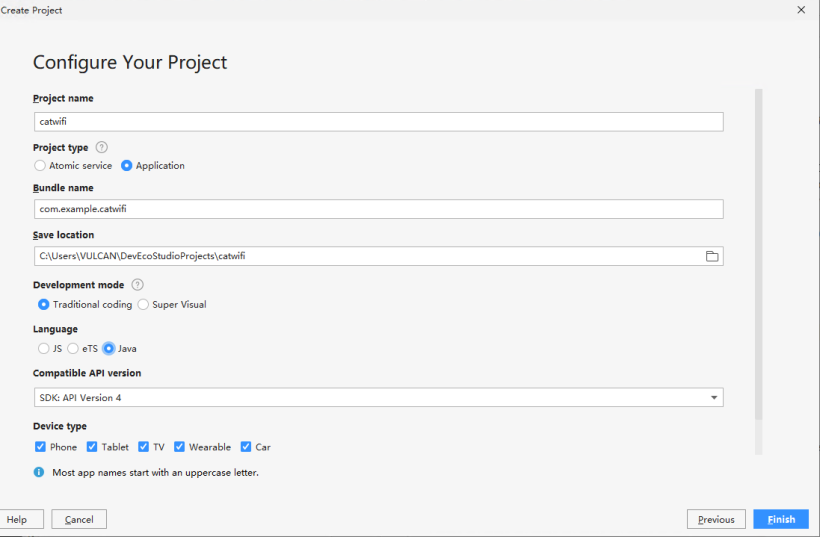
点击Finish。
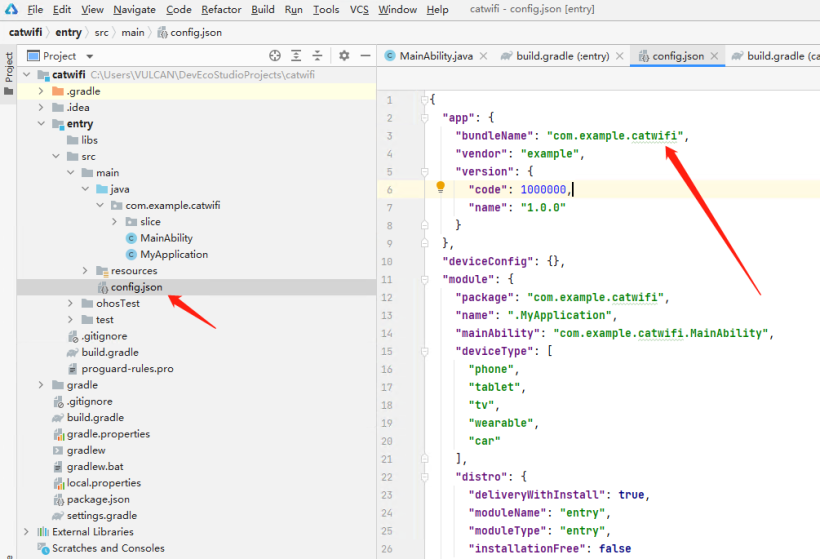
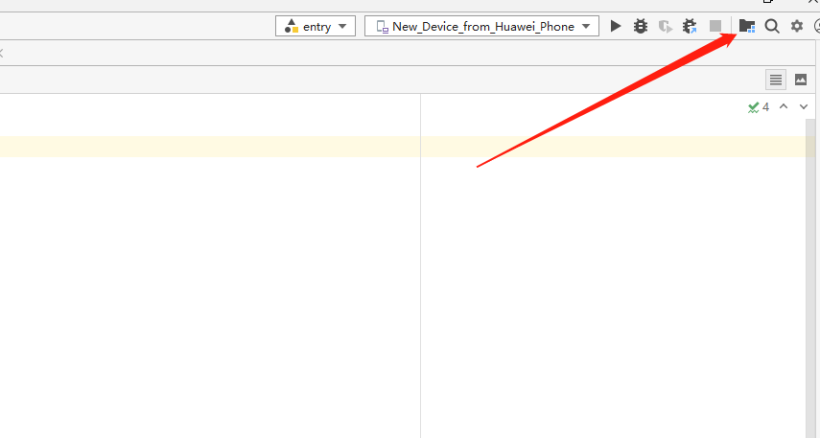
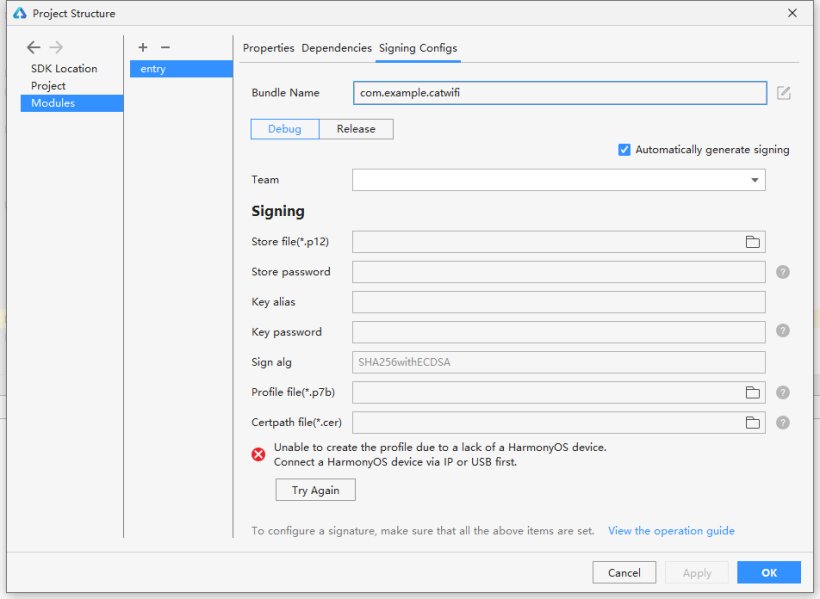
②.应用签名。
(1)复制bundleName。
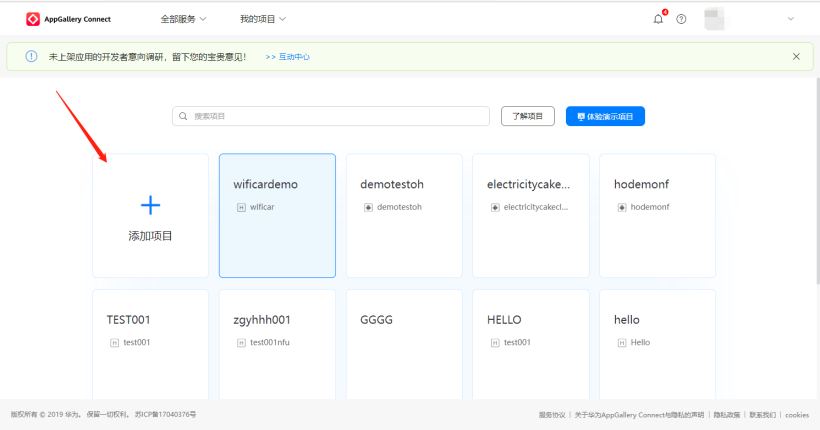
(2)打开链接。
https://developer.huawei.com/consumer/cn/service/josp/agc/index.html#/myProject。
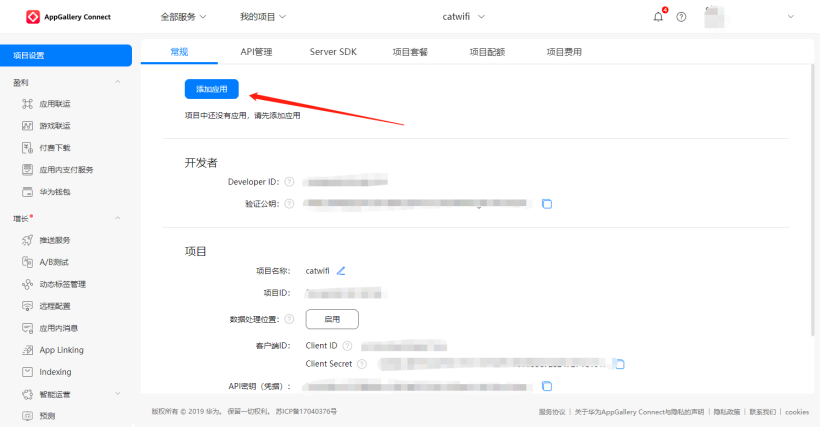
(3)点击添加项目。
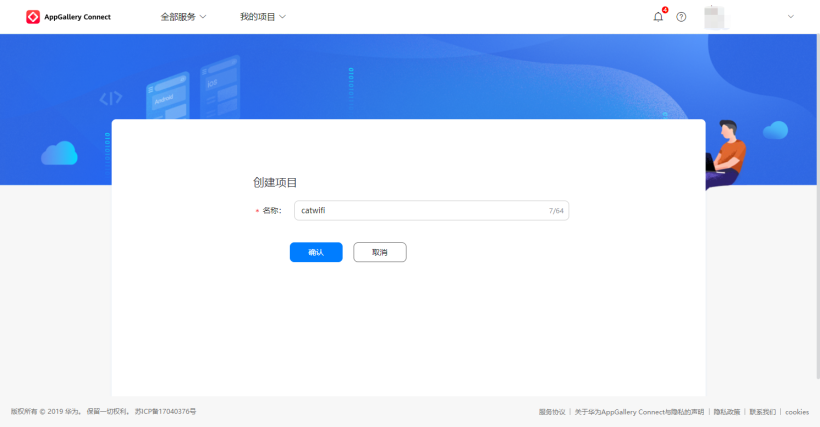
(4)输入项目名。
(5)点击添加应用。
(6)如图设置。
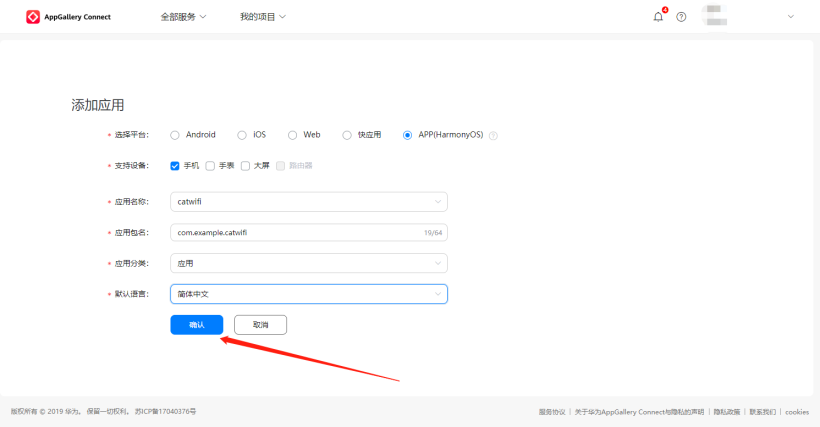
(7)点击。
(8)登录。
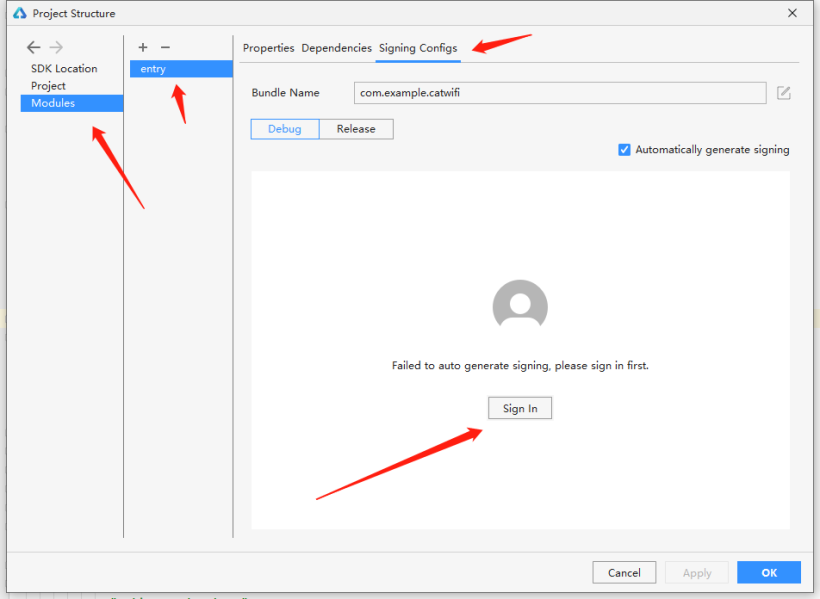
(9)获取签名(未连接手机)。
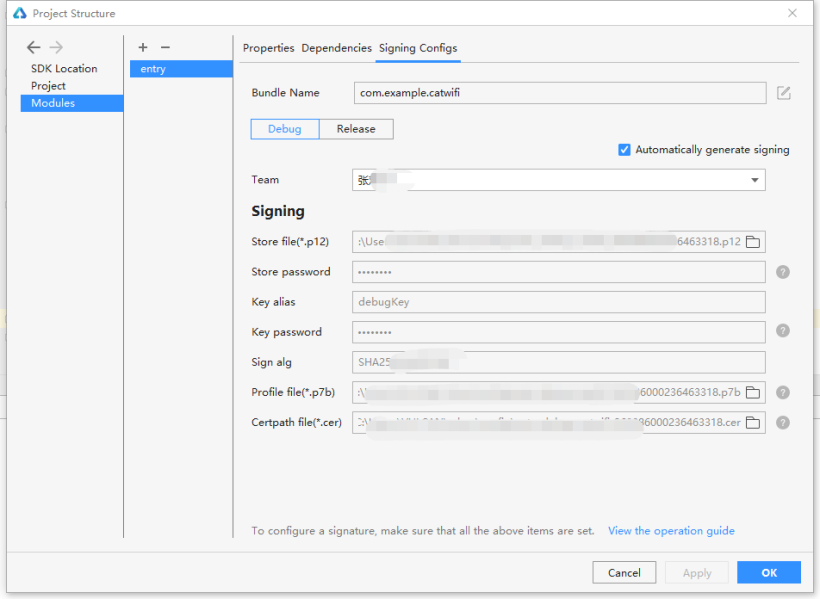
(10)获取签名(连接手机),点击Try Again,获取成功。
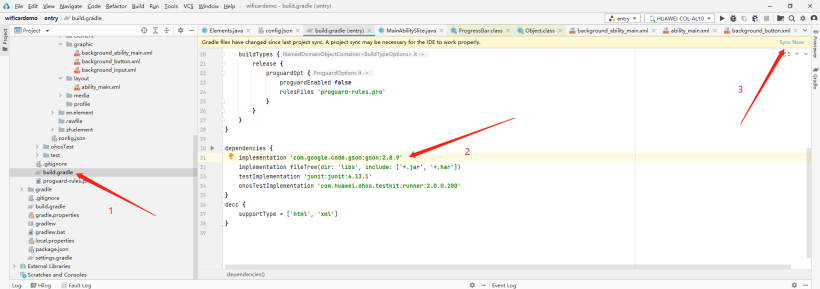
③.导入gson包
implementation 'com.google.code.gson:gson:2.8.9'
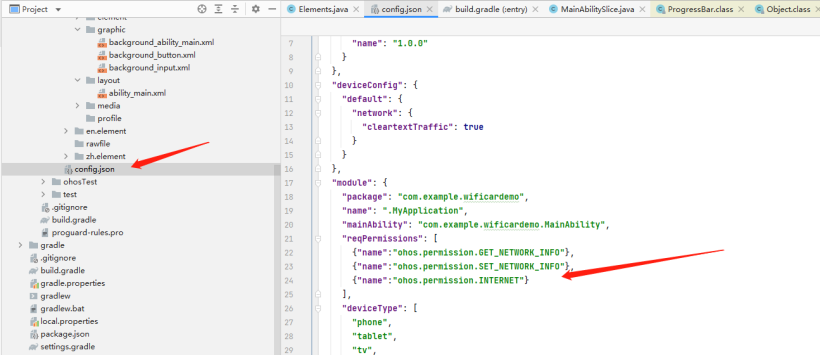
④.打开网络权限
"reqPermissions": [
{"name":"ohos.permission.GET_NETWORK_INFO"},
{"name":"ohos.permission.SET_NETWORK_INFO"},
{"name":"ohos.permission.INTERNET"}
],
⑤.UI设置
这里对UI就不展开讲了
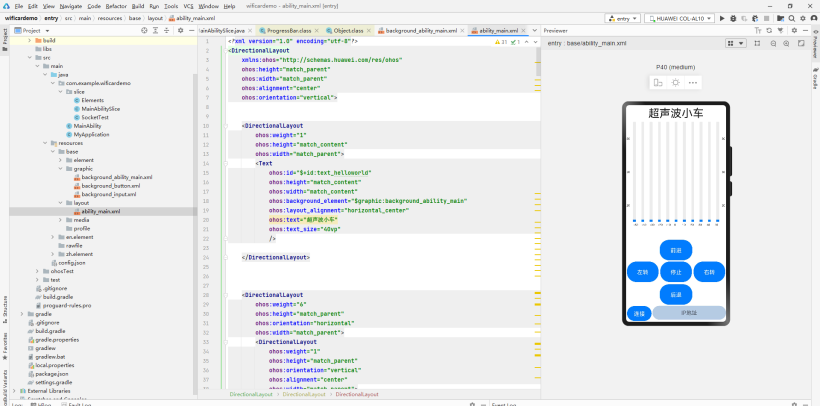
⑥.编写代码
编写文件:Elements.java
代码:
package com.example.wificardemo.slice;
public class Elements {
int angle = 0;
float cm = 0;
}
编写文件:MainAbilitySlice.java。
代码:
package com.example.wificardemo.slice;
import com.example.wificardemo.ResourceTable;
import ohos.aafwk.ability.AbilitySlice;
import ohos.aafwk.content.Intent;
import ohos.agp.components.Button;
import ohos.agp.components.Component;
import ohos.agp.components.ProgressBar;
import ohos.agp.components.TextField;
import ohos.global.resource.Resource;
import ohos.hiviewdfx.HiLog;
import ohos.hiviewdfx.HiLogLabel;
import java.util.List;
public class MainAbilitySlice extends AbilitySlice {
private static final HiLogLabel hilog = new HiLogLabel(HiLog.DEBUG ,0x0000, "test0002");
SocketTest ST = null;
ProgressBar[] PB = new ProgressBar[11];
@Override
public void onStart(Intent intent) {
int pbs[] = {ResourceTable.Id_progressbar,ResourceTable.Id_progressbar1,ResourceTable.Id_progressbar2,ResourceTable.Id_progressbar3,ResourceTable.Id_progressbar4,ResourceTable.Id_progressbar5,ResourceTable.Id_progressbar6,ResourceTable.Id_progressbar7,ResourceTable.Id_progressbar8,ResourceTable.Id_progressbar9,ResourceTable.Id_progressbar10};
super.onStart(intent);
super.setUIContent(ResourceTable.Layout_ability_main);
Button connects = findComponentById(ResourceTable.Id_connect_car);
Button bt1 = findComponentById(ResourceTable.Id_button1);
Button bt2 = findComponentById(ResourceTable.Id_button2);
Button bt3 = findComponentById(ResourceTable.Id_button3);
Button bt4 = findComponentById(ResourceTable.Id_button4);
Button bt5 = findComponentById(ResourceTable.Id_button5);
TextField text_field = findComponentById(ResourceTable.Id_text_field);
for(int i = 0;i<11;i++)
{
PB[i] = (ProgressBar)findComponentById(pbs[i]);
}
bt1.setClickedListener(new Component.ClickedListener() {
@Override
public void onClick(Component component) {
ST.sockerSend(1,1);
}
});
bt2.setClickedListener(new Component.ClickedListener() {
@Override
public void onClick(Component component) {
ST.sockerSend(1,4);
}
});
bt3.setClickedListener(new Component.ClickedListener() {
@Override
public void onClick(Component component) {
ST.sockerSend(1,0);
}
});
bt4.setClickedListener(new Component.ClickedListener() {
@Override
public void onClick(Component component) {
ST.sockerSend(1,2);
}
})
bt5.setClickedListener(new Component.ClickedListener() {
@Override
public void onClick(Component component) {
ST.sockerSend(1,3);
}
});
connects.setClickedListener(new Component.ClickedListener() {
@Override
public void onClick(Component component) {
if(ST !=null)
{
ST = null; //释放
}
try {
ST = new SocketTest(MainAbilitySlice.this,text_field.getText().toString(),20222);
ST.start();
Thread.sleep(200);
//ST.sockerSend(5,0,0);
} catch (Exception e) {
e.printStackTrace();
}
}
});
}
//Socker 接收回调函数
public void socketCallback(Elements con) {
getUITaskDispatcher().asyncDispatch(new Runnable() {
@Override
public void run() {
PB[con.angle].setProgressValue(con.cm>100 ? 100:(int)con.cm);
}
});
}
@Override
public void onActive() {
super.onActive();
}
@Override
public void onForeground(Intent intent) {
super.onForeground(intent);
}
}
编写文件:SocketTest.java。
代码:
package com.example.wificardemo.slice;
import com.google.gson.Gson;
import ohos.hiviewdfx.HiLog;
import ohos.hiviewdfx.HiLogLabel;
import java.io.IOException;
import java.io.InputStream;
import java.io.OutputStream;
import java.net.Socket;
public class SocketTest extends Thread{
private static final HiLogLabel hilog = new HiLogLabel(HiLog.DEBUG ,0x0000, "test0002");
Socket socket = null;
String host ="";
int port = 0;
InputStream inputStream = null;
OutputStream outputStream=null;
public boolean flag;
MainAbilitySlice mains = null;
public SocketTest(MainAbilitySlice mains,String host,int port) {
this.mains = mains;
this.host = host;
this.port = port;
}
public void sockerSend(int a,int b){
if(socket != null && outputStream != null)
{
new Thread(new Runnable() {
@Override
public void run() {
try {
byte[] data = new byte[3];
data[0] = (byte) 0xaa;
data[1] = (byte) a;
data[2] = (byte) b;
//data[3] = (byte) c;
outputStream.write(data);
outputStream.flush();
} catch (IOException e) {
e.printStackTrace();
}
}
}).start();
}else{
}
}
@Override
public void run() {
try {
flag = true;
while (flag)
{
socket = new Socket(host, port);
outputStream = socket.getOutputStream();
inputStream =socket.getInputStream();
init1();
socket.close();
}
} catch (IOException e) {
System.out.println("net erorr!"+e);
}
}
public void init1() {
try {
byte[] b = new byte[1024];
while (flag)
{
int n = inputStream.read(b);
if(n !=-1)
{
byte[] data = new byte[n];
for (int i=0;i<n;i++)
{
data[i] = b[i];
}
String str = new String(data);
Gson gson = new Gson();
HiLog.debug(hilog,"net !"+str,"");
if(n > 10) {
mains.socketCallback(gson.fromJson(str, Elements.class));
}
}else break;
}
}catch (Exception e){
HiLog.debug(hilog,"net erorr!"+e,"");
}
}
}
⑦.点击RUN 安装到手机。
5、测试
视频链接:https://www.bilibili.com/video/BV1pS4y1Y72j/。
代码开源地址:https://gitee.com/yukoyu/harmony-wifi-car。
测试成功!。

 蜀ICP备20004578号
蜀ICP备20004578号