
一、南向开发-风扇业务逻辑
可以使用开关量或者模拟量输出控制风扇。业务代码如下【完整刚才见附件smart_fan_iot.zip】:
static void WinderInit(void)
{
IoTGpioInit(8);
hi_io_set_func(8, HI_IO_FUNC_GPIO_8_PWM1_OUT);
IoTPwmInit(1); // GPIO8 初始化为PWM 1 输出 可控速度
IoTGpioInit(FAN_IO1);
hi_io_set_func(FAN_IO1, HI_IO_FUNC_GPIO_2_GPIO);
IoTGpioSetDir(FAN_IO1, IOT_GPIO_DIR_OUT);
IoTGpioSetOutputVal(FAN_IO1,IOT_GPIO_VALUE0); //GPIO2 初始化为输出 0 开关量
}
static void WinderLoop(void)
{
while (1)
{
if (strcmp(app_msg, "turn on fan") == 0)
{
IoTGpioSetOutputVal(FAN_IO1,IOT_GPIO_VALUE1);
IoTPwmStart(1, 95, 80000); // turn on fan
printf("turn on fan \r\n");
}
if (strcmp(app_msg, "turn off fan") == 0)
{
IoTGpioSetOutputVal(FAN_IO1,IOT_GPIO_VALUE0);
IoTPwmStop(1);// turn off fan
printf("turn off fan \r\n");
}
if (strcmp(app_msg, "lower speed") == 0)
{
IoTPwmStart(1, 40, 80000);
printf("lower speed \r\n");
}
if (strcmp(app_msg, "medium speed") == 0)
{
IoTPwmStart(1, 75, 80000);
printf("medium speed \r\n");
}
osDelay(WINDER_LOOP_DELAY);
}
}
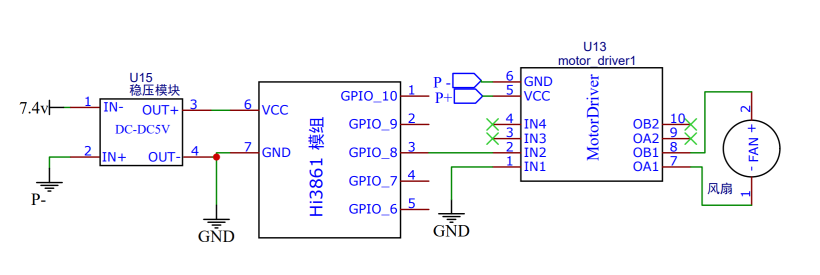
控制原理图:
二、Smart_fan演示
视频:smart fan demo。
 一
一
三、碰一碰机器人demo
到此,我们打通碰一碰开发道路,接下来可以实现更多有趣的项目。例如控制台灯、机器人。
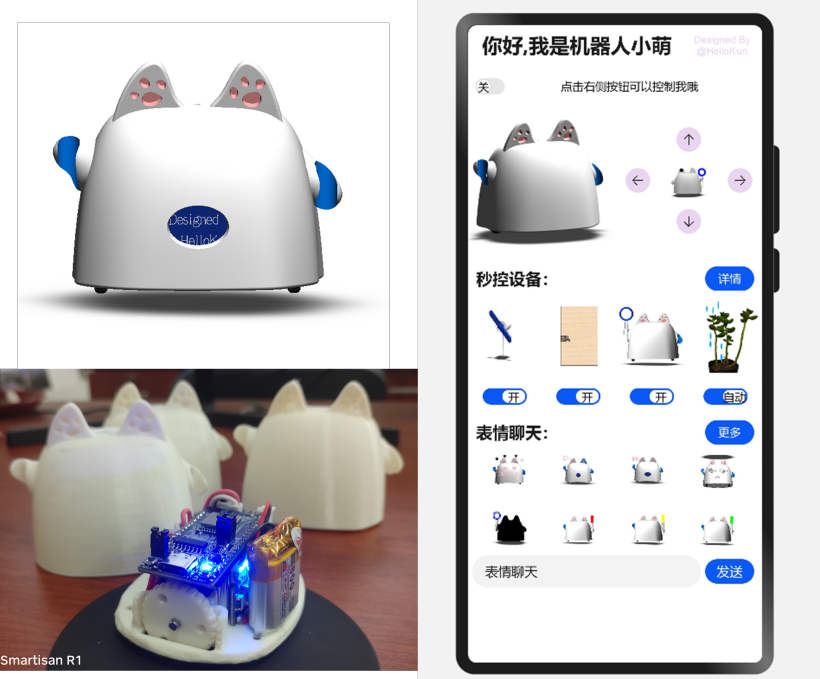
下面展示本人前不久开发出的桌面机器人MRobot:
可以实现碰一碰连接、控制其移动、帮你开风扇、开门、浇水,甚至可以语音交互等,还有一些有趣的配件可供玩耍。总之HarmonyOS/OpenHarmony 万物互联,实现所想。



基本开发流程和smart fan类似。
控制UI核心代码:
//运动控制
Forward(){
this.front_img='/common/images/up0.png';
this.work_status ="萌萌退下";
this.talk_msg = "F";
this.sendMessage();
},
Backward(){
this.front_img='/common/images/down0.png';
this.work_status ="萌萌冲冲冲";
this.talk_msg = "B";
this.sendMessage();
},
//表情聊天
Emoji_smile(){
this.emoji ="微笑";
this.talk_msg = "1";
// this.sendMessage();
},
Emoji_wao(){
this.emoji ="哇哦";
this.talk_msg = "2";
//this.sendMessage();
},
//秒控设备
Control_fan(e)
{
var ret=0;
console.log(e.checked);
if( e.checked){
this.talk_msg = "turn on fan";
this.sendMessage();
this.fan="/common/images/fanOn.png";
prompt.showToast({
message: "打开风扇"
});
}
else{
this.fan ="/common/images/fanOff.png";
this.talk_msg = "turn off fan";
this.sendMessage();
prompt.showToast({
message: "关闭风扇"
});
};
},
sendMessage(){
var ret =1;
var message = this.talk_msg;
let commonInfo = {
sessionId: getApp(this).ConfigParams.deviceInfo.sessionId
};
getApp(this).NetConfig.sendMessage(commonInfo, message, (result)=>{
if(result.code==0)
{
prompt.showToast({
message: "发送成功",
duration: 1000,
});
ret =0;}
else
{ prompt.showToast({
message: "发送失败",
duration: 1000,
});
ret= -1;};
});
if(ret==0)
{
return 0;
}
else return -1;
},
设备侧接收数据代码:
static void MRobotProcessAppMessage(const char *data, int data_len)
{
if (data_len != MESSAGE_LEN)
{
strcpy(app_msg, data);
// app_msg=data;
printf("------app_msg:%s \r\n", app_msg);
printf("----- data:%s\r\n", data);
WINERR("data len invalid! \n");
return;
}
}
static int MRobotNetEventHandler(NET_EVENT_TYPE event, void *data)
{
switch (event)
{
case NET_EVENT_CONNECTTED: // 网络连接成功
m_netstatus = true;
printf("m_netstatus:%d\n\n", m_netstatus); // 显示网络已连接
break;
case NET_EVENT_RECV_DATA: // 接收到网络信息(FA发送的消息)
MRobotProcessAppMessage((const char *)data, strlen(data)); // 处理对应的信息
break;
default:
break;
}
return 0;
}
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章
酷开网址导航收录名站网址,为您提供新闻、音乐、视频、小说、游戏等优秀网站、包括在线电影免费观看,与多种搜索引擎 、分享互联网实用最新的资源,在线小游戏,免费音乐下载,免费小说网,绿色软件等资源网站。
 蜀ICP备20004578号
蜀ICP备20004578号