自动配送药品机器人系统(一) — 背景及架构
一、功能演示视频链接
宣传视频:点击跳转B站
功能演示:点击跳转B站
二、目标问题与意义价值
- 解决多项联合国17项可持续发展目标中的问题。
- 目标 3:良好健康与福祉。
- 目标 9:产业、创新和基础设施。
- 目标 11:可持续城市和社区。
- 解决医院人力资源紧张问题。
- 提高医院运行效率以及资源利用率。
- 减轻医护人员工作压力,同时减少病人的交叉感染概率。
- 提高住院病人住院体验。
- 推进智慧化自动化医疗服务体系改革。
三、设计思路与方案
1、应用场景设计
目前,城市经济建设高速发展,智慧化平台不断渗入各个领域,带给我们许多便利。机器人应用到每个医院,针对不同的环境,都需要规划不同的路线以完成任务。基于以上背景,我们团队的成果需要满足以下需求:
- 能够准确前往特定病房的对应病床。
- 能够在药物配送完毕后返回药房。
- 能够及时同步各种药物信息给患者。
- 用户终端交互整洁交互简单便利,病人便捷取药,药房便捷配药。
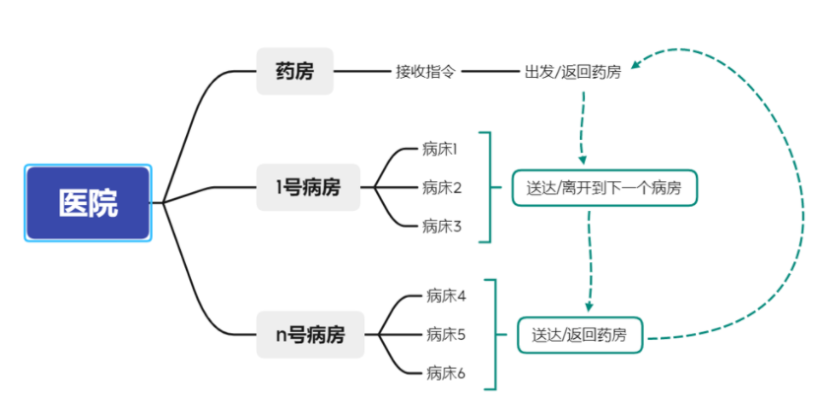

通过调查分析可以得知,如图3所示,应用场景主要分为药房和病床,药房OpenHarmony终端在云服务器上获取医生开具的药单信息,在机器人上放置相应药物,并且在药房的OpenHarmony终端应用上配置药物信息,机器人通过鸿蒙操作系统的软总线获得所配置的药物信息,确定所配送的各个病房,并自动规划最优路线;病房端配套有对应床位编号的NFC标签,病房的HarmonyOS手机设备可以利用NFC标签,进行“碰一碰”便捷得拉起鸿蒙的原子化服务卡片查看相关信息。并且病房内的各个病床终端会实时定位机器人所在的位置,机器人到达并配送后,会继续前往下一个病房;直至所有药物配送完毕,机器人会回到病房,准备下一轮的药物配送。这之中,主要会运用到对所在医院的定位导航,语音助手,避障系统的辅助配送,鸿蒙NFC标签的原子化服务功能。通过对这套场景所设计的相关功能,可以完成机器人的基本要求的设计,满足医院对配送药物的需求。
2、系统架构
全场景架构
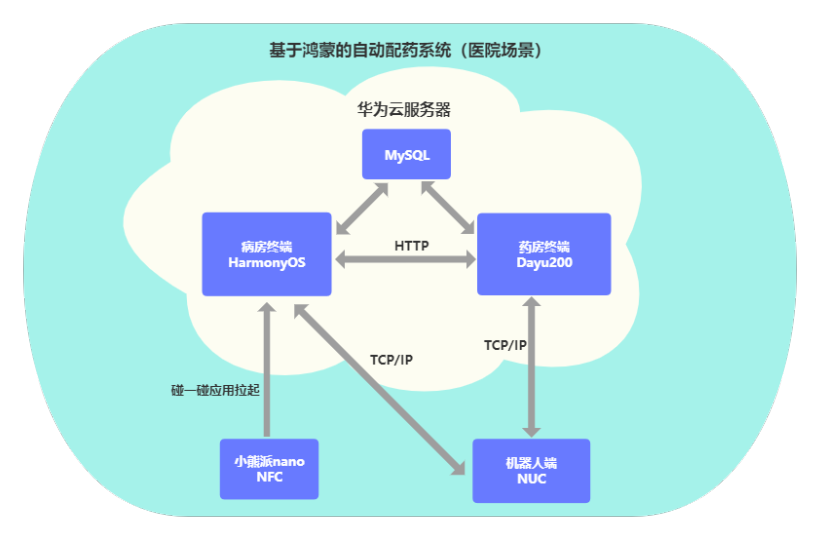

该系统病房端以及药房端与后端MySQL数据通信主要基于华为云服务器进行,以完成处方数据的云存储,以及各终端动态更新同步数据。其中在病房端采用小熊派Nano板作为NFC,可以碰一碰拉起应用,给用户带来更加便捷的体验。其次是病房终端以及药房终端通过TCP/IP协议与机器人端NUC进行通信,以调度机器人南向驱动,完成自动寻路,自动避障等相关交互。
故场景内包括药房终端(OpenHarmony Dayu200),病房终端(HarmonyOS),机器人平台,以及小熊派Nano NFC标签。
机器人平台框架介绍:


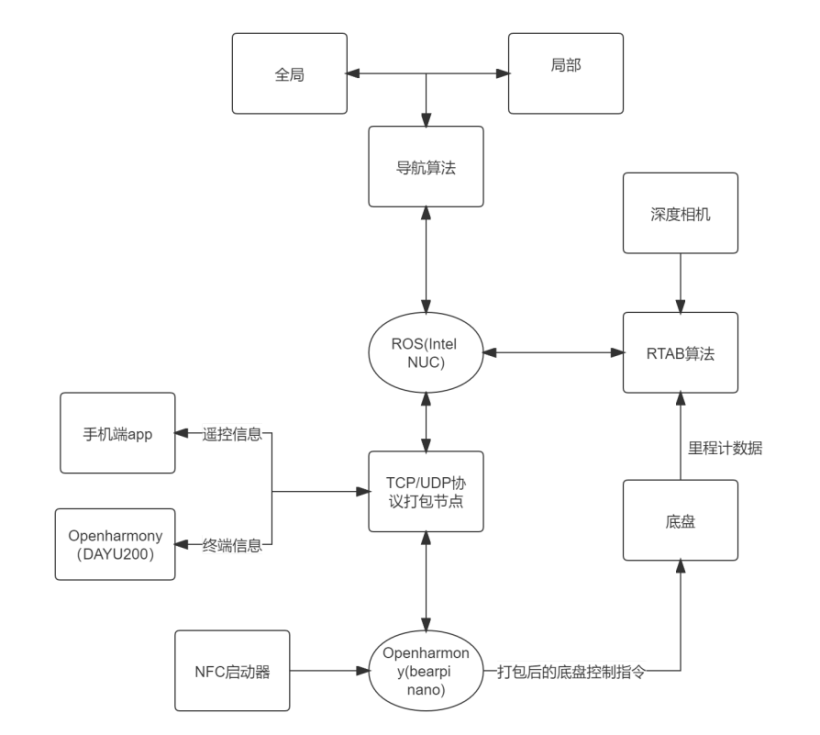
整体机器人在Openharmony系统的组织下架构 ,结构化模组分为。
- 上位机INTEL NUC部分通过LINUX系统运行ROS机器人操作系统进行高级传感器和控制算法的运行和解析如激光雷达深度相机导航算法等。
- openharmony中转节点,Openharmony是为启用其良好的传感器生态和接入外部设备而接入。
- 底盘包含执行器和传感器系统能够进行移动并且回传IMU以及里程计信息。
上图中的数据链路包含两部分:
- 控制指令数据通过下行链路由外部设备或ROS计算节点输出,通过wifi ap 发送至bearpi运行的openharmony系统,在鸿蒙系统中对下发指令进行状态机匹配后将最终控制指令下发到底盘,机器人即可开始运行。
- 上行数据链路首先由底盘打包里程计和IMU信息通过串口上传到ROS接受节点并作用于激光雷达,深度相机,结合TEB算子进行导航,同时另一部分状态信息由用户终端通过websocket发送到ROS接受节点并进行状态机选择匹配导航目标。
机器人端软件部分系统架构
Intel NUC 端 架构图:
3、应用UI设计
UI设计主要分为药房端,病床端,部分UI设计图如下:
登录启动页:

药房端首页:


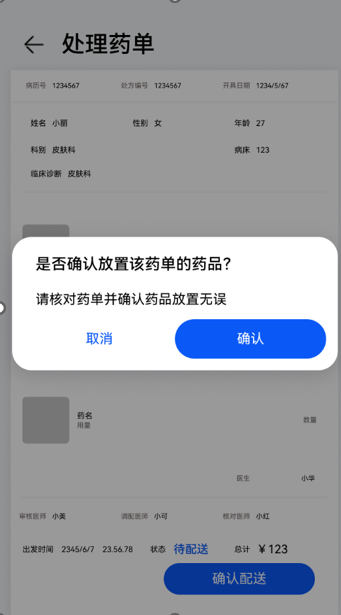
药房端处理药品页:

病床端药品已送达信息页:

 蜀ICP备20004578号
蜀ICP备20004578号